Landing Site Selection for Hayabusa2:
はやぶさ2の着陸地点決定
はやぶさ2探査では、小惑星リュウグウからの複数回のサンプル回収が予定されています。サンプルを地球へ持ち帰るというサンプルリターンは
はやぶさ2において最も主要なミッションです。リュウグウから直接採取し、持ち帰ったサンプルを地球の実験室で詳細分析することで、リュウグウの
物質科学的な特徴を非常に詳しく知ることができます。このような情報から、太陽系初期における鉱物・水・有機物の相互作用など生命の前駆物質の起源や、
太陽系形成論全体への大きな影響を与えるような発見がなされると期待されています。
サンプル回収のプロセスにおいては、着陸地点の選定が重要課題です。着陸地点の選定の際には、理学的な観点と工学的な観点が存在します。理学的な観点から
言えば、例えば、含水鉱物や有機物が存在する領域、リュウグウにおける典型的な物質が分布する領域、宇宙空間における風化(宇宙風化)の程度が低い領域などの
指標が存在します。一方、工学的な観点からは、サンプル回収を成功させること、つまり探査機の安全性の評価が重要です。この安全評価の基準は太陽との位置関係、
表面の傾斜角、高低差、ボルダー(岩塊)の存在度などです。この中で、はやぶさ2ミッションにおいて大きな問題となっていたのが、ボルダー存在度の高さで
あると言えます。ボルダーの多く存在するリュウグウ表面のうち、少しでも安全な領域からサンプルを回収することが求められました。リュウグウ表面には、
20m以上のボルダーが単位面積当たりイトカワの2倍も存在しており、また、ボルダーが全球一様に分布しているために、イトカワのように平坦な領域も存在しません。
その意味で、はやぶさ初号機に比べ、はやぶさ2の着陸は非常に困難なものだったのです。
本研究室では、この様な着陸地点の決定のために、光学航法カメラ(ONC)を用いた観測計画の立案や、 画像解析、スペクトル解析を行っています。
具体的には、ボルダーやクレーターの全球分布の解析、表面の物質組成や 宇宙風化度に関する情報を得るためのスペクトル解析、それらの解析手法の
開発などを行っています。
特に、ボルダー存在度の解析については、画像上の、目視では判別できない小さなボルダー(sub-pixelから数pixelの程度)の存在度を機械的に
解析する手法を、室内実験などを用いて開発しました。それをリュウグウにも適用し、安全な着陸領域の探索を行いました。例えば、
一度目の着陸に関しては、図2に示している各着陸候補地点における小さなボルダー(0.75-3m)の存在度を評価し、表1のような結果が得られました。
これは、L08がボルダー存在度の観点からは最も安全な地点であることを示しています。この結果は、L08を第一回目の着陸地点として選定する
際の判断材料の一つとなりました。また、二度目の着陸に向けて、ボルダーの少ない地点の全球網羅的な再探索を、本手法を用いて行いました。
その結果、図のような新たな着陸候補地点を見つけることができました。最終的には、この①付近の地点に二度目の着陸を行い、1,2回目ともに
着陸は成功しました。
文責: 田辺
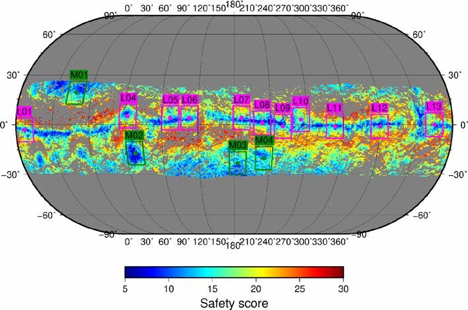
Fig.1 はやぶさ2着陸のための安全度スコアマップ。太陽との位置関係、表面の傾斜角、高低差などをもとに各地点の安全性をスコア化。
青いエリアほど安全度が高い地点。初期段階では上記のような15の候補地点が選ばれていました。©JAXA
|
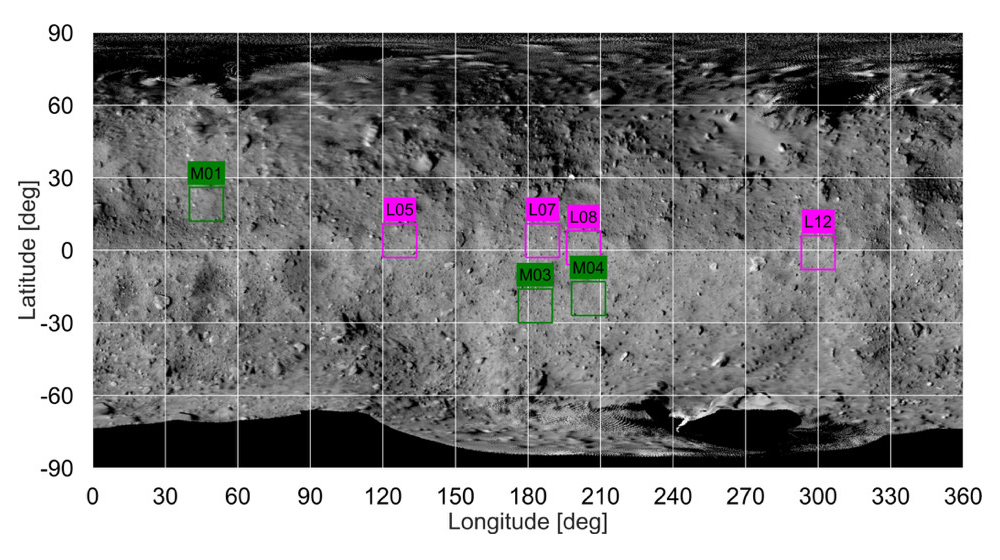
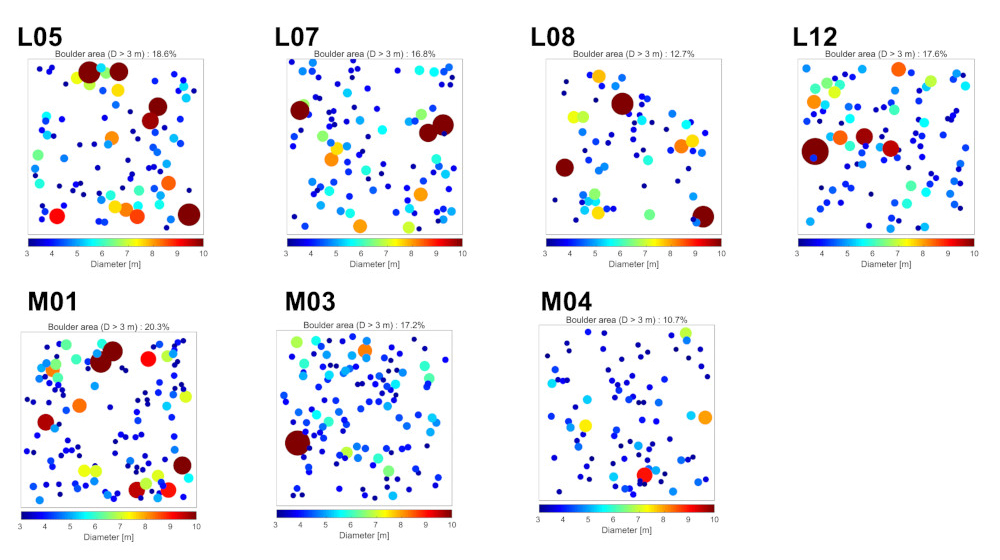
Fig.2 上:さらに各地点の画像を詳細に確認し、各地点のボルダーの数や分布、平坦さなどにより、候補地点を絞り込みました。 下: 各地点のボルダー分布。©JAXA
|
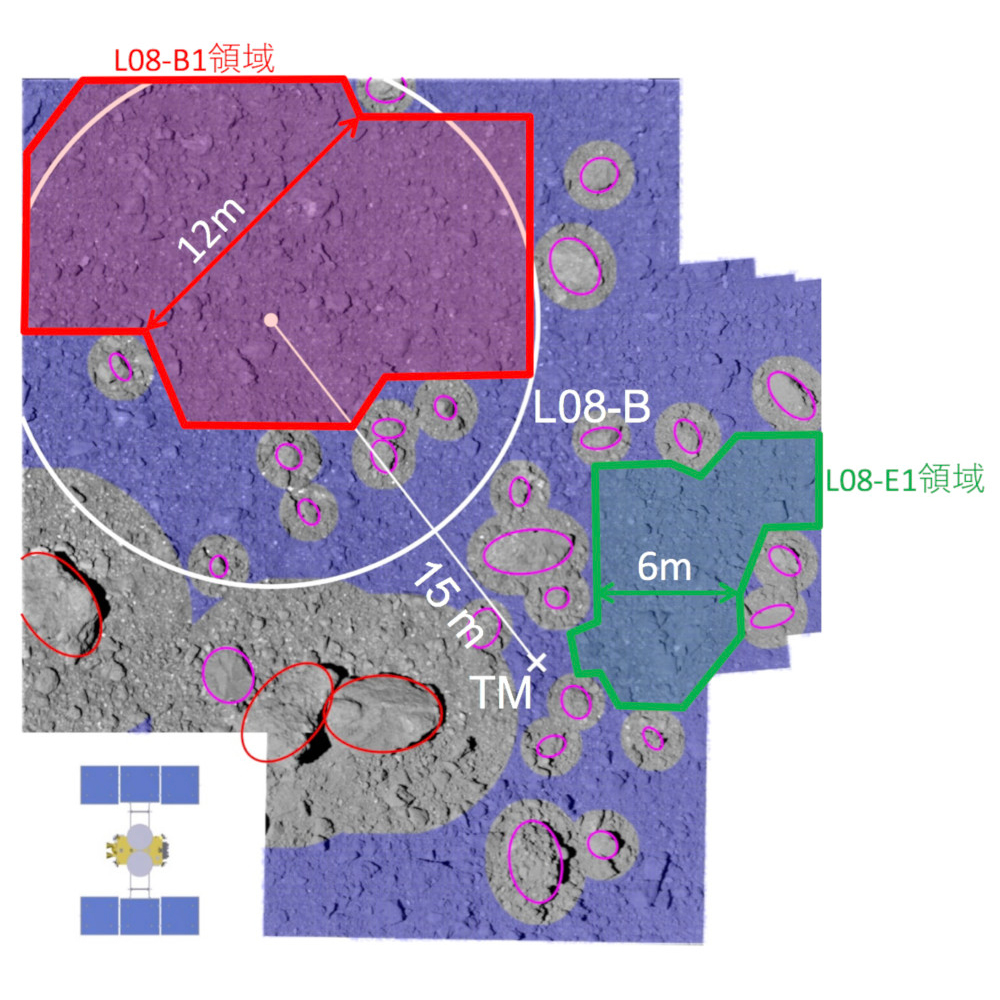
Fig.3 更に近傍からの撮像を行い、候補地点の詳細な画像を取得。最終的にL08と呼ばれる地点が着陸地点として選出。
さらに、ボルダーの密度や着陸精度などからL08のうち、L08-E1という地点が最終的な着陸目標地点となりました。©JAXA
|

Fig.4 はやぶさ2の1度目の着陸直後の画像。©JAXA
|
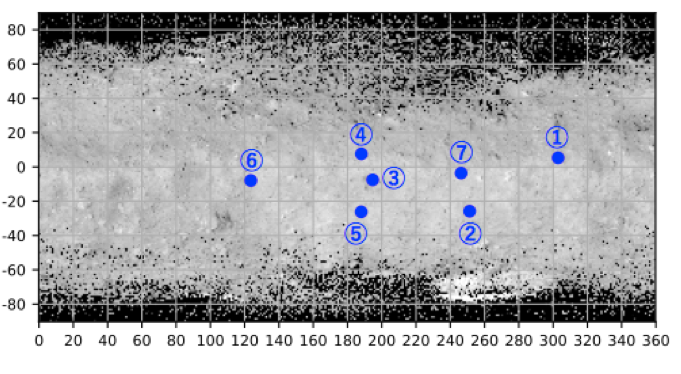
Fig.5 本研究室の開発した手法により新たに見つけた着陸候補地点
|

Table.1 本研究室の開発した手法による第一回目の着陸候補地点のボルダー被覆率
|
|


